Robotis OP3
Open-source humanoidplattform och nuvarande standard i RoboCup Humanoid League. Bygger på Robotis Dynamixel-servon och har en mjukvarustack som etablerats över flera generationer.

OP3 är den humanoid som mer än någon annan har lärt en generation universitetsstudenter att koda bipedal balans och autonomi. Plattformen är open-source i både ROS-stack och CAD.
Modellens åldrande hårdvara börjar kännas, särskilt jämfört med Unitree G1 i samma prisklass. Men ekosystemet runt OP3, inklusive RoboCup, håller den fortsatt relevant.
Bilder


Recensioner och citat
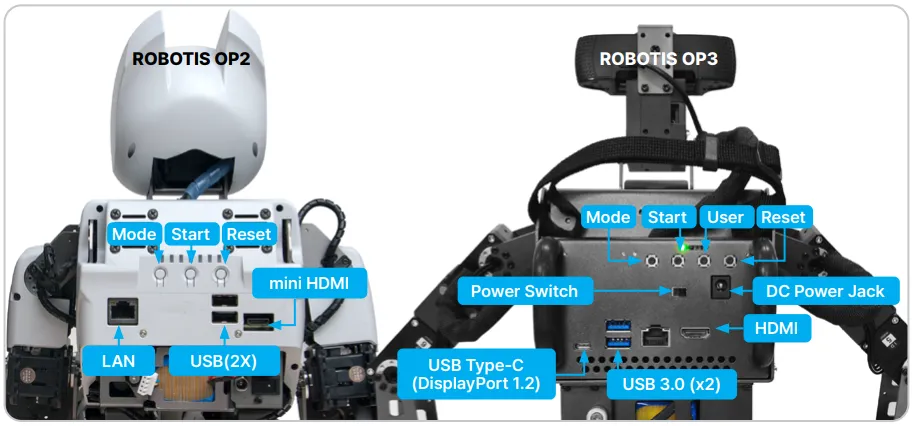
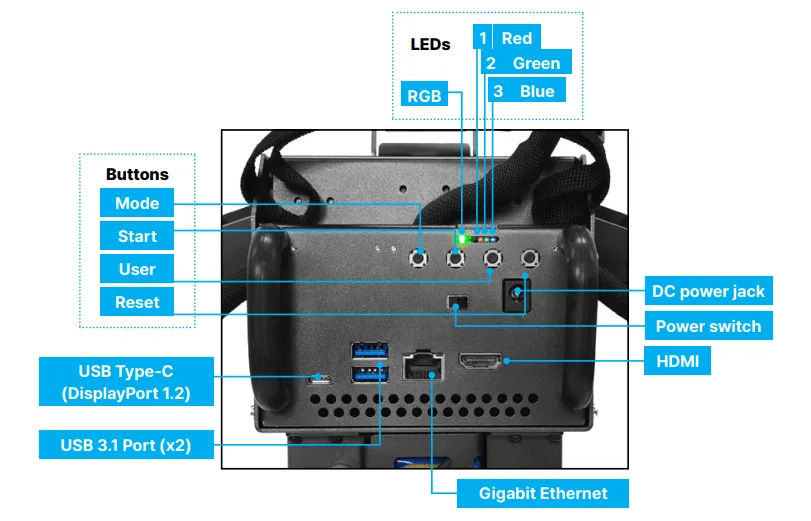
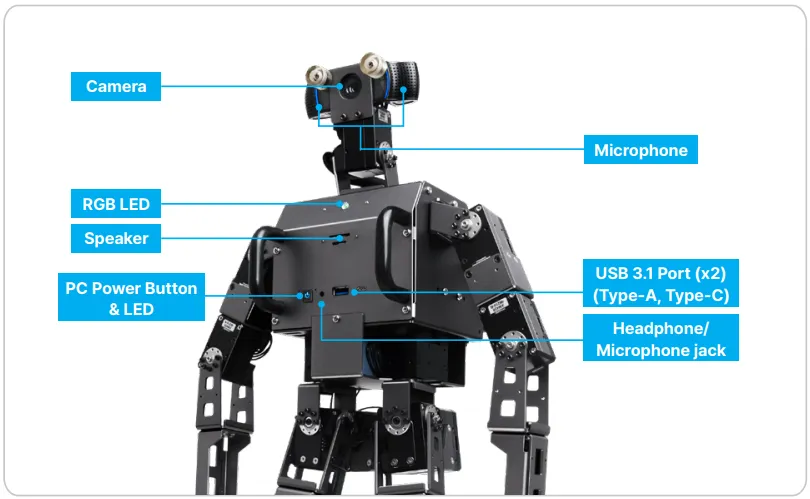
OP3 is a ~46 cm, ~3.5 kg bipedal humanoid from ROBOTIS designed for education and robotics research, including RoboCup-style development. It uses 20 DYNAMIXEL actuators and supports ROS on Ubuntu via an onboard Intel NUC, with Wi‑Fi/Bluetooth/Ethernet connectivity and a USB camera for vision-based projects.
humanoidhub.ai
ROBOTIS OP3 is a small bipedal humanoid research and education platform with 20 DOF and an open software stack used in robotics competitions and labs.
HumanoidHub , 2026-05-19
For a reasonable price, you get a robot equipped with a more powerful computer than many of its competitors. It is therefore a complete and very versatile robot that will satisfy a wide range of requirements.
Generation Robots , 2020-01-17
The OP3 Humanoid by Robotis is priced From ~$11,000. Contact HumanoidHub for current pricing and procurement options.
HumanoidHub , 2026-05-01